近日,在2025英特尔中国学术峰会上,英特尔携手学界与产业界的合作伙伴,共同发布了《具身智能机器人安全子系统白皮书》(以下简称《白皮书》)。该白皮书从系统架构维度构建了一套安全子系统的设计框架,致力于为机器人系统提供全方位、多层次的安全防护。此白皮书由英特尔中国研究院、武汉大学、香港中文大学(深圳)、清华大学、国地共建具身智能机器人创新中心、南京英麒智能、优必选科技以及英特尔亚太研发中心的技术专家联合撰写而成。
具身智能机器人是一类能融合感知、认知与执行能力,在真实环境中完成物理任务的智能体,在制造、物流、医疗等“人工智能+”场景里有着广阔的应用潜力,不过其安全风险也存在于感知、决策与执行的整个链路中。白皮书提出的安全框架,正是为了系统性地应对实体交互、系统失效、数据安全等多方面挑战,为机器人在复杂环境中的可靠运行打下基础。
当前,依托英特尔酷睿Ultra处理器等硬件的算力支撑,以及相应的软件开发工具与AI加速框架,英特尔正不断推动具身智能技术向场景化、规模化应用迈进。此次白皮书的发布,同样标志着产业界与学术界在携手构建机器人安全体系的进程中跨出关键一步,为“可信具身智能”的未来发展筑牢了重要基石。

《具身智能机器人安全子系统白皮书》正式发布
英特尔研究院副总裁、英特尔中国研究院院长宋继强指出:“具身智能机器人从实验室迈向千家万户与千行百业的进程里,安全是必须坚守的基础,是一切创新和价值实现的前提。我们十分荣幸能和学界、产业界的伙伴携手发布《具身智能机器人安全子系统白皮书》,为行业提供一套系统化且可落地的安全框架‘蓝图’。借助英特尔中国学术峰会这个开放平台,我们会继续促进技术创新与产业需求的深度结合,加快前沿技术向实际生产力的转化,携手构建安全、可靠的具身智能未来。”
针对具身智能机器人与人类近距离交互协作过程中的物理接触风险问题,《白皮书》构建了一套以“动作单元”为核心的操作框架。该框架明确要求,无论“动作单元”采用何种内部技术实现,都必须满足可监控、可管理的基本要求,同时需清晰界定其适用操作条件(ODD)。每个“动作单元”支持独立开展测试与验证工作,通过验证后可实现跨场景复用;此外,不同“动作单元”能够根据任务需求灵活组合,形成适配复杂场景的任务流程,进而在任务复杂度持续提升、环境条件动态变化的情况下,保障机器人运行的可控性与安全性。
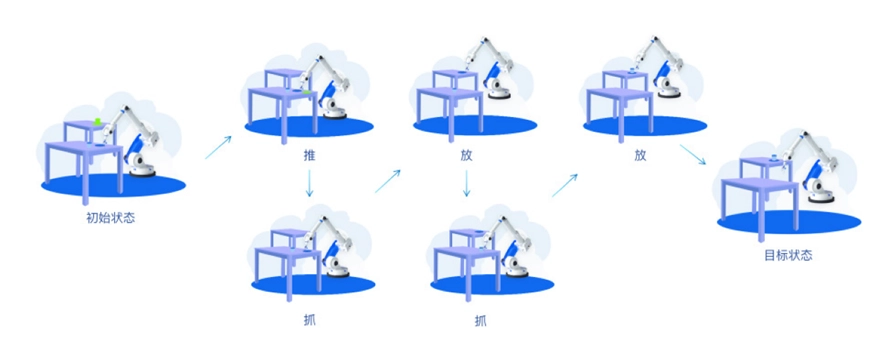
动作单元示意图
另外,《白皮书》还引入了PMDF安全架构,其目的是对风险进行系统性管理,保证机器人系统在各类复杂场景下都能安全运行。这一架构依据功能,把具备安全功能的机器人系统划分成四个在逻辑上相互独立的模块,即具身智能主控系统(P)、监控系统(M)、安全决策(D)以及故障处理和恢复(F)。其中M、D、F三个模块共同构成一个安全子系统,该子系统能够借助RISC-V等独立硬件来实现,这样既可以确保较高的安全性,又能直接部署在机器人本体上。各个模块之间相互配合、协同工作,一同构筑起稳固的安全屏障。
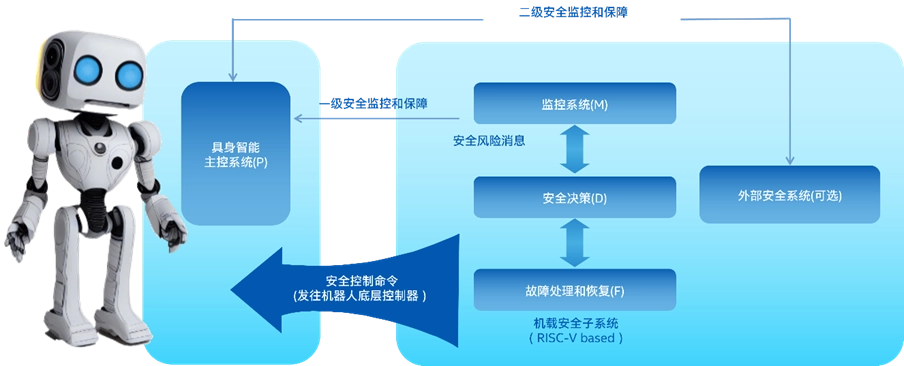
多级机器人安全子系统
展望未来,英特尔将持续携手广大生态系统伙伴,凭借开放平台与协同创新的优势,进一步推进具身智能安全子系统的技术研发与实践验证工作,力求搭建起涵盖本体安全、交互安全与应用安全的全方位防护体系。我们期望通过促进软硬件的深度整合以及标准的联合制定,与行业同仁一同应对安全难题,助力具身智能机器人在工业、家庭、医疗等多样化场景中达成更稳定、更普及的应用,让其真正成为人类生产生活里值得信赖的智能助手。